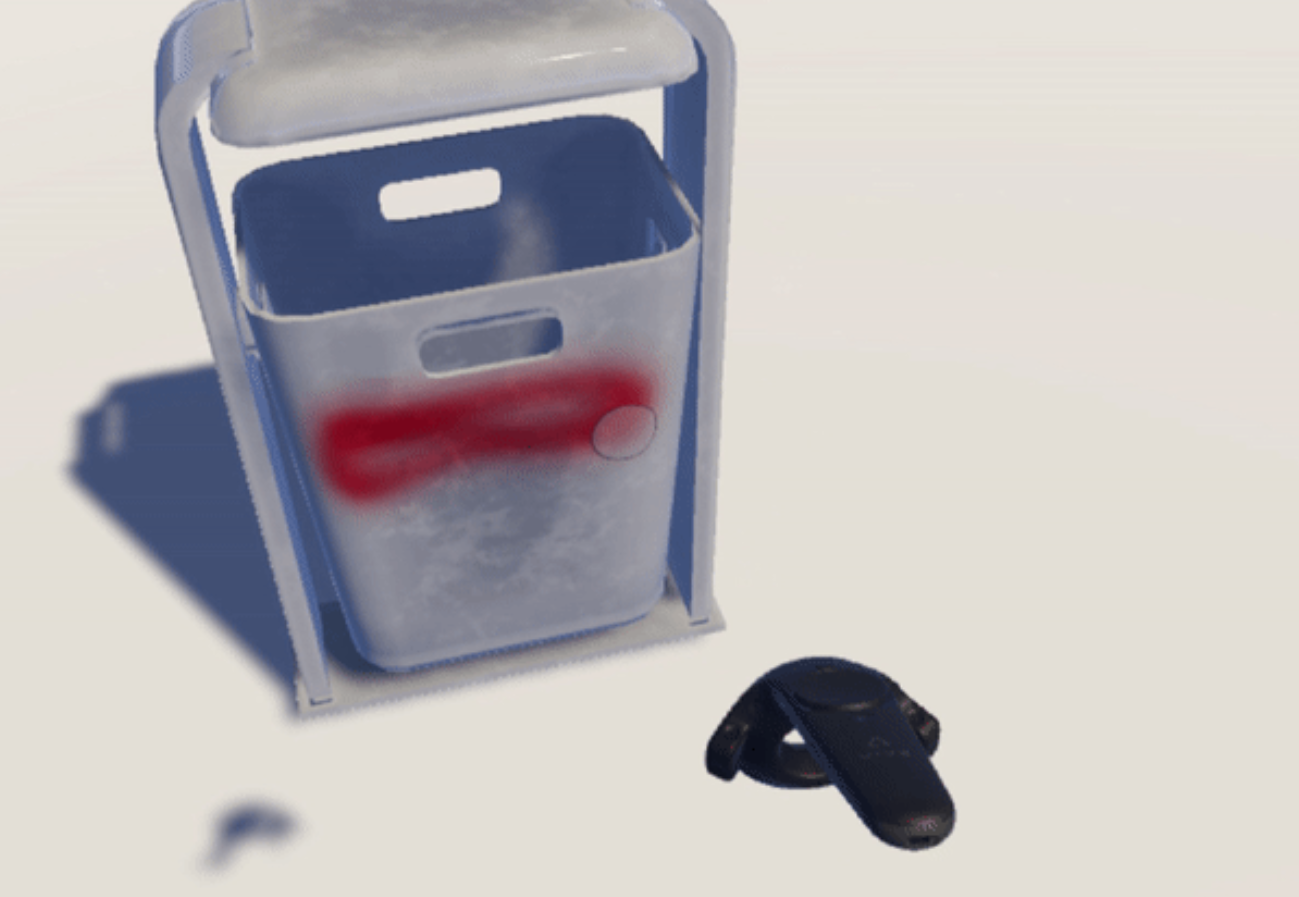
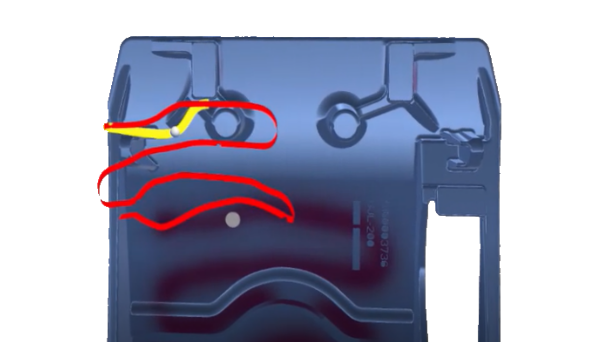
The overall goal of the project is to create an intuitive, easy to use, and fast robot programming environment, based on VR (Virtual Reality), AR (Augmented Reality), MR (Mixed Reality), or their combination that will serve fast and accurate programming of industrial robots in a flexible manufacturing plant for low volume and high variability production. For this project I worked on a real time paint visualisation in VR, as well as on interactive VR tools to help the user edit paths they created.